Component model
High-level component model
In GVSOC, the system to be simulated is modeled using a component-based approach.
Each piece of hardware which is modeled is a component and is interacting with other components only through well identified bindings.
Bindings are connections between a master port of a component to a slave port of another connection. They allow both sides to interact together using function calls.
Each port has a signature, which is the set of methods that the component can call on the other component.
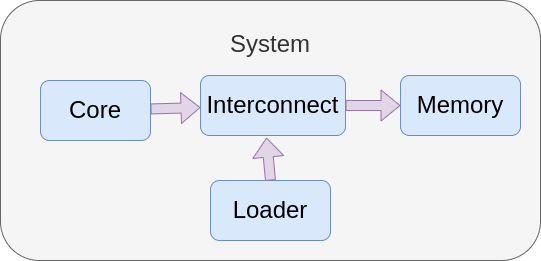
The following figure shows an example where a core is connected to a router so that it can fetch instructions and do memory accesses. The router can route requests to a single target, the memory. A loader is also connected to the router so that it can preload the binary to be executed into the memory.
Python generators
The system to be simulated is assembled using Python scripts called generators. They describe the system as a set of components built hierarchically and connected together. This is also the place where each component is specialized by receiving values to its parameters, like the size of the memory.
Composites for building systems
Composites are intermediate components which are not associated model code and are just assembling components together in order to build a bigger component which can in turn be used by a higher-level component.
The figure below shows the example described previously, implemented with a Python generator. Components are instantiated by instantiating their Python class, and giving at the same time the values of their parameters. Bindings are done by calling components methods.
Although primitives are mostly used for assembling other components, they can also sometime be associated with C++ code, for example to implement some power modeling code at the composite level.
import cpu.iss.riscv
import memory.memory
import vp.clock_domain
import interco.router
import utils.loader.loader
import gvsoc.systree
import gvsoc.runner as gvsoc
# Tell Gapy that this file describes a valid target
GAPY_TARGET = True
class Soc(gvsoc.systree.Component):
def __init__(self, parent, name, parser):
super().__init__(parent, name)
# Parse the arguments to get the path to the binary to be loaded
[args, __] = parser.parse_known_args()
binary = args.binary
# Main memory
mem = memory.memory.Memory(self, 'mem', size=0x00100000)
# Main interconnect
ico = interco.router.Router(self, 'ico')
# Add a mapping to the memory and connect it.
ico.o_MAP(mem.i_INPUT(), 'mem', base=0x00000000, remove_offset=0x00000000, size=0x00100000)
# Instantiates the main core and connect fetch and data to the interconnect
host = cpu.iss.riscv.Riscv(self, 'host', isa='rv64imafdc')
host.o_FETCH (ico.i_INPUT ())
host.o_DATA (ico.i_INPUT ())
# Finally connect an ELF loader, which will execute first and will then
# send to the core the boot address and notify him he can start
loader = utils.loader.loader.ElfLoader(self, 'loader', binary=binary)
loader.o_OUT (ico.i_INPUT ())
loader.o_START (host.i_FETCHEN ())
loader.o_ENTRY (host.i_ENTRY ())
# This is a wrapping component of the real one in order to connect a clock generator to it
# so that it automatically propagate to other components
class Rv64(gvsoc.systree.Component):
def __init__(self, parent, name, parser, options):
super().__init__(parent, name, options=options)
clock = vp.clock_domain.Clock_domain(self, 'clock', frequency=100000000)
soc = Soc(self, 'soc', parser)
clock.o_CLOCK (soc.i_CLOCK ())
# This is the top target that gapy will instantiate
class Target(gvsoc.Target):
def __init__(self, parser, options):
super(Target, self).__init__(parser, options,
model=Rv64, description="RV64 virtual board")
Primitives for wrapping C++ models
Primitives are Python classes wrapping C++ model into Python components which can then be instantiated and bound by composites.
Their constructor must have a set of paramaters which are used to configure the instance of the component. These parameters must be propagated to the component properties, so that the framework generates a JSON file containing all the parameters and passes them to the C++ model.
It must be associated C++ source code and can also have C flags. The framework will compile one version of the component for each set of source code and flags so that they can depend on the parameters.
Primitive components must also expose the available ports through methods, so that the user can easily know what must or can be connected when assembling this component.
Hereafter you can see the exemple of a memory.
import gvsoc.systree
class Memory(gvsoc.systree.Component):
"""Memory array
This models a simple memory model.
It can be preloaded with initial data.
It contains a timing model of a bandwidth, reported through latency.
It can support riscv atomics.
Attributes
----------
parent: gvsoc.systree.Component
The parent component where this one should be instantiated.
name: str
The name of the component within the parent space.
size: int
The size of the memory in bytes.
width_log2: int
The log2 of the bandwidth to the memory, i.e. the number of bytes it can transfer per cycle.
No timing model is applied if it is zero and the memory is then having an infinite
bandwidth.
stim_file: str
The path to a binary file which should be preloaded at beginning of the memory. The format
is a raw binary, and is loaded with an fread.
power_trigger: bool
True if the memory should trigger power report generation based on dedicated accesses.
align: int
Specify a required alignment for the allocated memory used for the memory model.
atomics: bool
True if the memory should support riscv atomics. Since this is slowing down the model, it
should be set to True only if needed.
"""
def __init__(self, parent: gvsoc.systree.Component, name: str, size: int, width_log2: int=2,
stim_file: str=None, power_trigger: bool=False,
align: int=0, atomics: bool=False):
super().__init__(parent, name)
self.add_sources(['memory/memory.cpp'])
# Since atomics are slowing down the model, this is better to compile the support only
# if needed. Note that the framework will take care of compiling this model twice
# if both memories with and without atomics are instantiated.
if atomics:
self.add_c_flags(['-DCONFIG_ATOMICS=1'])
self.add_properties({
'size': size,
'stim_file': stim_file,
'power_trigger': power_trigger,
'width_bits': width_log2,
'align': align
})
def i_INPUT(self) -> gvsoc.systree.SlaveItf:
"""Returns the input port.
Incoming requests to be handled by the memory should be sent to this port.\n
It instantiates a port of type vp::IoSlave.\n
Returns
----------
gvsoc.systree.SlaveItf
The slave interface
"""
return gvsoc.systree.SlaveItf(self, 'input', signature='io')
C++ component model
Module constructor
The C++ code of a component must have a special function which will be called by the upper-level component to instantiate this one.
This function must return a new instance of the C++ class of the component and pass it the configuration that the function received.
Here you can see an example.
extern "C" vp::Component *gv_new(vp::ComponentConf &config)
{
return new Memory(config);
}
Class declaration
The class of a primitive component must inherit from vp::Component, as seen on this example:
#include <vp/vp.hpp>
class Memory : public vp::Component
{
public:
Memory(vp::ComponentConf &config);
};
In case a composite needs to include some C++, it must then inherit from vp::Composite, like in this example:
#include <utils/composite.hpp>
class Cluster : public vp::Composite
{
public:
Cluster(vp::ComponentConf &config);
};
Class constructor
Here are examples of constructors for both primitives and composites:
Memory::Memory(vp::ComponentConf &config)
: vp::Component(config)
{
}
Cluster::Cluster(vp::ComponentConf &config)
: vp::Composite(config)
{
}
Port declaration
The ports of the component must be first declared in the component class.
For each signature, there is a pair of C++ classes, one for master port and one for slave port, which can be used to declare the port with the right signature.
Some signature like the wire interface, are templates.
class Memory : public vp::Component
{
public:
Memory(vp::ComponentConf &config);
private:
static vp::IoReqStatus request_handler(vp::Block *__this, vp::IoReq *req);
vp::IoSlave request_itf;
vp::WireMaster<bool> notif_itf;
};
Then the ports must be configured. The name given here is the one that the Python generator should return.
All the slave interfaces must be associated callbacks, which are methods which will get called, when the port on the other side is called. The slave is supposed to implement the associated activity in this callback.
Master ports can sometime also have callbacks, to make the binding bidirectional.
Memory::Memory(vp::ComponentConf &config)
: vp::Component(config)
{
this->request_itf.set_req_meth(&Memory::request_handler);
this->new_slave_port("input", &this->request_itf);
this->new_master_port("notif", &this->notif_itf);
}
Here is the list of available port signatures.
Name |
Path in core module |
Ports |
|---|---|---|
Clock domain registration |
engine/include/vp/itf/clk.hpp |
ClkMaster -> ClkSlave |
Clock configuration |
engine/include/vp/itf/clock.hpp |
ClockMaster -> ClockSlave |
Wire |
engine/include/vp/itf/wire.hpp |
WireMaster -> WireSlave |
Memory-mapped IO requests |
engine/include/vp/itf/io.hpp |
IoMaster -> IoSlave |
I2C |
engine/include/vp/itf/i2c.hpp |
I2cMaster -> I2cSlave |
JTAG |
engine/include/vp/itf/jtag.hpp |
JtagMaster -> JtagSlave |
I2S |
engine/include/vp/itf/i2s.hpp |
I2sMaster -> I2sSlave |
SPI |
engine/include/vp/itf/qspim.hpp |
QspimMaster -> QspimSlave |
Hyperbus |
engine/include/vp/itf/hyper.hpp |
HyperMaster -> HyperSlave |
CPI |
engine/include/vp/itf/cpi.hpp |
CpiMaster -> CpiSlave |
UART |
engine/include/vp/itf/uart.hpp |
UartMaster -> UartSlave |
Port method implementation
As seen earlier, ports methods must be implemented with class methods, which will get called when the remote port is called.
They must be static methods, as we can see on this example:
static vp::IoReqStatus req(vp::Block *__this, vp::IoReq *req);
The class instance is always passed as first argument and can be casted to the component class:
vp::IoReqStatus Memory::req(vp::Block *__this, vp::IoReq *req)
{
Memory *_this = (Memory *)__this;
Port method call
On the caller side, the port is called simply by calling the right method on the port. Each port has his own set of methods coming from the signature.
void Memory::reset(bool active)
{
if (!active)
{
this->notif_itf.sync(true);
}
}
Component JSON configuration
Each Python component has a set of properties which are passed to the C++ model through a JSON configuration.
They usualy come from the Python wrapper parameters and needs to be propagated as properties:
def __init__(self, parent: gvsoc.systree.Component, name: str, size: int, width_log2: int=2,
stim_file: str=None, power_trigger: bool=False,
align: int=0, atomics: bool=False):
super().__init__(parent, name)
self.add_properties({
'size': size,
'stim_file': stim_file,
'power_trigger': power_trigger,
'width_bits': width_log2,
'align': align
})
This is the JSON file generated:
"mem": {
"size": 1048576,
"stim_file": null,
"power_trigger": false,
"width_bits": 2,
"align": 0,
"vp_component": "gen_memory_memory_cpp_149327240",
"ports": [
"input"
]
}
The properties can then be retrieved from C++ using the js::Config class which provides a set of methods for accessing the properties according to their type:
Memory::Memory(vp::ComponentConf &config)
: vp::Component(config)
{
js::Config *config = this->get_js_config();
this->size = config->get_child_int("size");
}